Mars Science Laboratory is a "Curiosity" on Mars
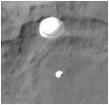
At first glance, the proposed landing technique for the rover seemed insane. Its supposed to work this way: The rover and all of its landing paraphernalia enters the Martian atmosphere behind its heat shield at very high speed. After the heat shield has done its job and the rover has slowed down enough, the heat shield is ejected and the main parachute is deployed (see picture above). (NOTE: Since the martian atmosphere is quite thin, parachutes don't provide the same braking power as we Earth-dwellers enjoy. In the case of Curiosity, its speed was reduced from Mach 2.2 (about 1400 mph) to about 220 mph. This is why Mars landing craft need rocket breaking to land on Mars in one piece.) Somewhere in the process "floating" down towards the martian surface by parachute the rover prepares its wheels and such for surface operations and then lowers itself several meters by cable to end up suspended below a rocket powered platform. This is called the "sky crane" configuration. In the last few seconds, the rockets on the platform fire and bring the rover to a gentle stop on the Martian surface. At about the same time as the rover touches down, the cables holding the rover to the rocket platform are cut and the rocket platform flies off somewhere other than on top of the Curiosity rover. A better explanation for this process can be found here. So congratulations to NASA and to the engineer who came up with this bold landing plan!
posted by bill at 2:01 PM
![]()
![]()

0 Comments:
Post a Comment
<< Home